SPACAR Light
Example: Compute motion/deformations of a parallel flexure guide
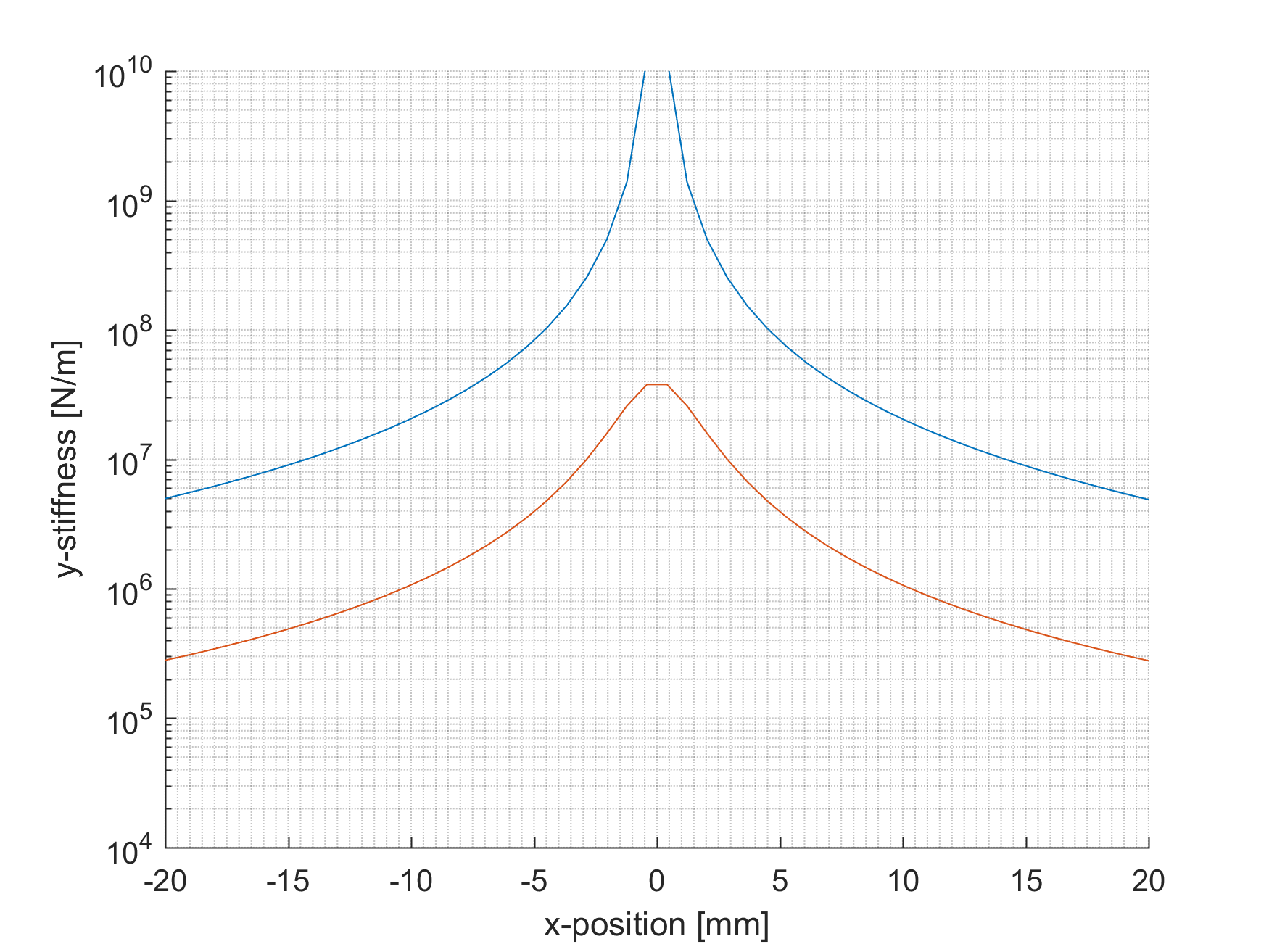
This example shows the static simulation of a parallel flexure guide which moves from -20 mm deflection up to 20 mm deflection in x-direction (the degree of freedom of the parallel flexure guide). Goal is to evaluate the translational stiffness in the supporting directions (y- and z-direction) of the end-effector over the range of motion.
After a successful simulation, SPACAR Light returns the compliance matrix of each node (per loadstep) - see the Full Syntax List. For a compliance matrix C, it holds that u = C*f. Vector u = [ux;uy;uz;rx;ry;rz] consists of displacement components ux, uy, uz (in the x-,y- and z-direction, resp.) and rotation components rx, ry, rz (about the x-,y- and z-axis, resp.). Vector f = [fx;fy;fz;mx;my;mz] consists of force components fx, fy, fz (in the x-,y- and z-direction, resp.) and moment components mx, my, mz (about the x-,y- and z-axis, resp.). For the 'global' compliance matrix CMglob, the components are resolved in the global coordinate frame. This is the fixed (inertial) frame (which is also the axes frame indicated in SpaVisual with labels x, y and z). For the 'local' compliance matrix CMloc, the components are resolved in the local frame of the node (meaning that the coordinate frame rotates with the node). The stiffness matrix K, for which f = K*u, is the inverse of the compliance matrix C.
The figure bellow provides the stiffness values over the entire range. It can be clearly seen that with increasing deflection, support stiffness drops. Furthermore, the initial stiffness in y-direction is infinite as only the out-of-plane bending and torsion deformations are considered.
An example file for providing the input for SPACAR Light is provided below.
- pfg_example.m
clear clc % addpath('spacar') %point this to the spacar folder %% NODE POSITIONS nodes = [-50e-3 0.0 0 %node 1 -50e-3 100e-3 0 %node 2 0 100e-3 0 %node 3 50e-3 100e-3 0 %node 4 50e-3 0 0]; %node 5 %node 3 is only added so that the system properties can be evaluated right there %% ELEMENT CONNECTIVITY elements = [1 2 %element 1: 1st leafspring 2 3 %element 2: 1st half of rigid body 3 4 %element 3: 2nd half of rigid body 4 5]; %element 4: 2nd leafspring %% NODE PROPERTIES nprops(1).fix = true; %fix begin 1st leafspring nprops(5).fix = true; %fix end 2nd leafspring nprops(3).force = [0 -10 0];%load of 10N on node 3 y-direction nprops(3).mass = 1; %1kg mass at node 3 nprops(3).displ_initial_x = -20e-3; %initial displacement, node 3 -20mm moved in x nprops(3).displ_x = 40e-3; %additional displacement, node 3 40mm moved in x %% ELEMENT PROPERTIES eprops(1).elems = [1 4]; %both leafsprings eprops(1).emod = 210e9; %steel eprops(1).smod = 70e9; %steel eprops(1).dens = 7800; %steel eprops(1).dim = [30e-3 0.5e-3]; eprops(1).cshape = 'rect'; eprops(1).flex = 1:6; eprops(1).orien = [0 0 1]; eprops(1).nbeams = 2; %2 beams per element eprops(1).color = [0.8549 0.8588 0.8667]; eprops(2).elems = [2 3]; %rigid body eprops(2).dens = 2700; %aluminium eprops(2).dim = [30e-3 10e-3]; eprops(2).cshape = 'rect'; eprops(2).orien = [0 0 1]; eprops(2).color = [0.1686 0.3922 0.6627]; %% OPTIONAL opt.gravity = [0 0 -9.81]; %gravity in z-direction opt.loadsteps = 50; %additional load steps (default 10) to get %higher resolution plots %% DO SIMULATION out = spacarlight(nodes,elements,nprops,eprops,opt); %% POST PROCESS RESULTS %plot stiffness values over the range of motion Ky(:) = 1./out.node(3).CMglob(2,2,:); %y stiffness evaluated at node 3 Kz(:) = 1./out.node(3).CMglob(3,3,:); %z stiffness evaluated at node 3 x = out.node(3).p(1,:).*1000; %position of the end-effector in mm (.*1000) fig1 = figure; hold on plot(x,Ky) plot(x,Kz) grid minor xlabel('x-position [mm]') ylabel('y-stiffness [N/m]') fig1.Children.YScale = 'log'; %plot with log yscale fig1.Children.YLim = [1e4 1e10];