This is an old revision of the document!
Table of Contents
SPACAR Light walkthrough example
This walkthrough given an example of the simulation of a parallel flexure guide.
Problem description
Let's consider a parallel flexure guide consisting of two parallel leafsprings and an intermediate rigid body. For this problem, we consider L=100mm and W=50mm. Furthermore, we consider steel leafsprings with a width of 50mm and a thickness of 0.5mm. The rigid intermediate body is made from aluminium and has a cross-section of 50x50mm. A schematic overview is given in the figure below.
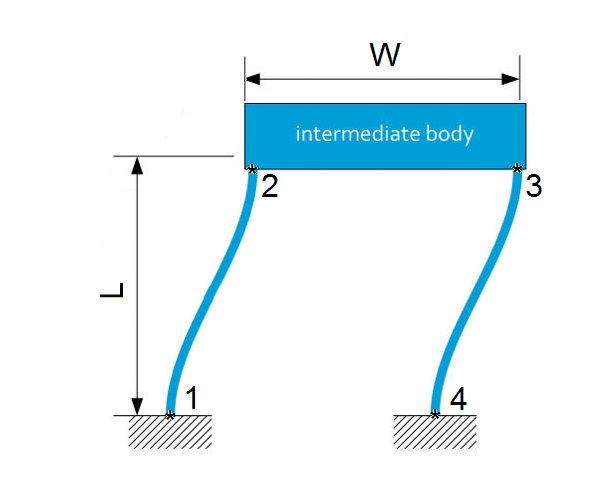
Figure: Parallel flexure guide (from janssenprecisionengineering.com)
Set up simulation
To set up the simulation, we first need to define the Node postions, Element connectivity, Node properties and the Element properties.
Node positions
We start by defining the positions of the nodes where we place the origin at node 1. nodes is an nn×3 matrix for defining the positions of the nodes. Each row represents a node (there are nn nodes). The row number determines the number a node gets. The first column contains the x-coordinate of the node position, the second column the y-coordinate, and the third column the z-coordinate.
clc %clear command window clear %clear workspace %% NODE POSITIONS L = 0.1; %[m] W = 0.05; %[m] %% NODE POSITIONS nodes = [0 0 0; %node 1 0 L 0; %node 2 W L 0; %node 3 W 0 0]; %node 4
Element connectivity
Next the connectivity between elements is defined. Element connectivity is defined by an ne×2 matrix for defining elements. Each row represents an element (there are ne elements). The row number determines the number an element gets. Each element connects two nodes. The first column contains the number of the node that the element is connected to on one side, the second column the node number that the element is connected to on the other side.
%% ELEMENT CONNECTIVITY elements= [1 2; %leafspring between node 1 and 2 2 3; %intermediate body 3 4]; %leafspring between node 3 and 4
Node properties
Node properties are defined by a structure array to assign properties to nodes, such as boundary conditions, applied loads, and inertia. The usage is nprops(i).field = value; to assign property field with value value to node i. For a full syntax list with all possible inputs, see SPACAR Light syntax.
First of all, node 1 and 4 are fixed:
%% NODE PROPERTIES nprops(1).fix = true; %fix node 1 nprops(4).fix = true; %fix node 4
Furthermore, we would like for the parallel flexure guide to start 10mm deflected to the left and let it move 20mm to the right. For this purpose, we pre-describe the position of node 2 in x-direction:
nprops(2).displ_initial_x =-0.01; %start with node 2 displaced 10mm to the left nprops(2).displ_x = 0.02; %displace node 2 20mm to the right
At last we apply a load of 5N in Z-direction on node 2 and 3
nprops(2).force_initial = [0 0 5]; %initial load of 5N i z-direction nprops(3).force_initial = [0 0 5]; %initial load of 5N i z-direction
Element properties
Element properties are defined by a structure array for assigning properties to elements, such as dimensions, material constants, flexibility, and visual appearance. Properties are created in sets, such that the same set of properties can be assigned to multiple elements.
The usage is eprops(i).field = value; to assign property field with value value to set i. For a full syntax list with all possible inputs, see SPACAR Light syntax.
The first element property set is assigned to both leafsprings (element 1 and 3), selected material is steel, width = 50mm, thickness 0.5mm and torsional and out-of-plane bending deformations are considered flexible. Furthermore, two spacar-beams are used to model flexibility of the leafsprings.
%% ELEMENT PROPERTIES %first element property set eprops(1).elems = [1 3]; %assing property set 1 to element 1 and 3 eprops(1).emod = 210e9; %E-modulus [Pa] eprops(1).smod = 70e9; %G-modulus [Pa] eprops(1).dens = 7800; %density [kg/m^3] eprops(1).dim = [0.05 0.0005]; %crossectional dimension [w t] in [mm] eprops(1).cshape = 'rect'; %crossectional shape rectangular eprops(1).flex = [2 3 4]; %torsional (2) and out-of-plane bending (3,4) deformations are flexible eprops(1).orien = [0 0 1]; %width-direction of leafspring oriented in z-direction eprops(1).nbeams = 2; %Leafspring simulated with 2 spacar-beams for increased accuracy.
The second element property set is assigned to the intermediate body (element 1 and 3), selected material is aluminium, width = 50mm and thickness = 50mm.
%second element property set eprops(2).elems = [2]; %assing property set 2 to element 2 eprops(2).dens = 2700; %density [kg/m^3] eprops(2).dim = [0.05 0.05]; %crossectional dimension [w t] in [mm] eprops(2).cshape = 'rect'; %crossectional shape rectangular eprops(2).orien = [0 0 1]; %width-direction of leafspring oriented in z-direction
Resolve overconstraints
At this moment we have defined the basic configuration for our simulation and we can analyze the overconstraints in our model. For an initial suggestion for the releases to resolve the overconstraints, we can call spacarlight with
out = spacarlight(nodes,elements,nprops,eprops);
When the system is properly defined, the number of overconstraints and the suggestion for released deformation modes is provided in the command window like below:
Warning: System is overconstrained; releases are required in order to run static simulation.
A suggestion for possible releases is given in the table below.
Number of overconstraints: 7
Element def_1 def_2 def_3 def_4 def_5 def_6
_______ _____ _____ _____ _____ _____ _____
1 1 1 1 1 1 1
2 1 1 1 1 1 1
3 1 1 1 1 1 1
It appears this problem contains 7 overconstraints and a suggestion is provided. Now we can add a single released deformation mode with the help of table and redo the overconstrained analyses. Therefore, we define the rls structure array which assigns 'released' deformation modes. The usage is rls(i).def = value; to assign the released deformations modes value to element i. More information on using the rls structure is provided at SPACAR Light syntax.
To release the second deformation mode of element two, we use:
%% RELEASES rls(1).def = [2];
If we now redo the overconstraint analysis (call out = spacarlight(nodes,elements,nprops,eprops,rls);), it will show 6 overconstraints and an updated release table. By repeating this process six more times and by adding a single released deformation at each step, a full set of releases can be obtained (multiple solutions/combinations are possible):
%% RELEASES rls(1).def = [1 2 3 4 5 6]; rls(3).def = [3];
Run simulation
When an exact constrained model is obtained, spacarlight automatically runs the static simulation when it is called an a visualization of the model will appear. For more information on the visualization GUI, see ????.
Furthermore, simulation results are stored in the output argument out.
Example script
- example.m
clear clc L = 0.1; %[m] W = 0.05; %[m] %% NODE POSITIONS nodes = [0 0 0; %node 1 0 L 0; %node 2 W L 0; %node 3 W 0 0]; %node 4 %% ELEMENT CONNECTIVITY elements= [1 2; %leafspring between node 1 and 2 2 3; %intermediate body 3 4]; %leafspring between node 3 and 4 %% NODE PROPERTIES nprops(1).fix = true; %fix node 1 nprops(4).fix = true; %fix node 4 nprops(2).displ_initial_x =-0.01; %start with node 2 displaced 10mm to the left nprops(2).displ_x = 0.02; %displace node 2 20mm to the right nprops(2).force_initial = [0 0 5]; %initial load of 5N in z-direction nprops(3).force_initial = [0 0 5]; %initial load of 5N in z-direction %% ELEMENT PROPERTIES %first element property set eprops(1).elems = [1 3]; %assing property set 1 to element 1 and 3 eprops(1).emod = 210e9; %E-modulus [Pa] eprops(1).smod = 70e9; %G-modulus [Pa] eprops(1).dens = 7800; %density [kg/m^3] eprops(1).dim = [0.05 0.0005]; %crossectional dimension [w t] in [mm] eprops(1).cshape = 'rect'; %crossectional shape rectangular eprops(1).flex = [2 3 4]; %torsional (2) and out-of-plane bending (3,4) deformations are flexible eprops(1).orien = [0 0 1]; %width-direction of leafspring oriented in z-direction eprops(1).nbeams = 2; %Leafspring simulated with 2 spacar-beams for increased accuracy. %second element property set eprops(2).elems = [2]; %assing property set 2 to element 2 eprops(2).dens = 2700; %density [kg/m^3] eprops(2).dim = [0.05 0.05]; %crossectional dimension [w t] in [mm] eprops(2).cshape = 'rect'; %crossectional shape rectangular eprops(2).orien = [0 0 1]; %width-direction of leafspring oriented in z-direction %% RELEASES rls(1).def = [1 2 3 4 5 6]; rls(3).def = [3]; %% DO SIMULATION out = spacarlight(nodes,elements,nprops,eprops,rls);